Chi Tiết Mạch Điều Khiển Tốc Độ Motor Dc 12V /24V, Hướng Dẫn Điều Khiển Tốc Độ Motor Dc
Điều khiển vận tốc motor DC là vấn đề được rất nhiều người quan liêu tâm hiện nay khi nhưng máy móc vẫn dần sửa chữa trong tất cả các khâu của quá trình sản xuất để mang lại năng suất cao hơn. Vậy, việc điều khiển vận tốc motor DC bằng Arduino dễ hay khó? Cùng khám phá nhé!
1. Điều khiển tốc độ motor DC: khái niệm, phân loại?
Trong quy trình điều khiển tốc độ motor DC bởi Arduino, vụ việc mà họ quan tâm đó là motor DC. Vậy, motor DC là gì?
Động cơ một chiều motor DC (DC là viết tắt của từ giờ Anh “Direct Current Motors”) là đụng cơ tinh chỉnh bằng chiếc điện được đặt theo hướng xác định. Hay nói mang đến dễ hiểu hơn thì motor DC là loại bộ động cơ chạy bởi nguồn điện áp 1 chiều DC khác với nguồn tích điện áp AC là năng lượng điện xoay chiều.
Bạn đang xem: Mạch điều khiển tốc độ motor dc 12v
Đầudây ra của hộp động cơ DC thườngbao tất cả 2 dây (dây nguồn cam kết hiệu VCC với dây tiếp đất cam kết hiệu GND). Nói chung, DC motor là một trong động cơ năng lượng điện một chiều cùng với cơ năng vận động quay liên tục.
DC là một động cơ năng lượng điện một chiều với cơ năng hoạt động quay liên tục
Động cơ điện một chiều DC được phân loại theo kích từ để thành những các loại sau:
Kích từ bỏ độc lập.Kích từ nối tiếp.Kích từ láo hợp.Kích từ song song.2. Điều khiển hộp động cơ DC bởi Arduino
Trong phần này, chúng ta sẽ tìm hiểu cách điều khiển vận tốc motor DC bằng Arduino. Họ cũng cần xem xét một trong những kỹ thuật cơ phiên bản để rất có thể điều khiển được hộp động cơ DC và trải qua 2 ví dụ sẽ là cách điều khiển và tinh chỉnh động cơ DC bằng trình điều khiển L298N và board mạch điều khiển và tinh chỉnh Arduino.
a) Mạch điều khiển vận tốc motor
PWM DC
PWM tuyệt phương pháp chuyển đổi độ rộng xung là 1 trong những kỹ thuật góp cho họ điều chỉnh quý hiếm trung bình hiện tại của điện áp chạy mang lại thiết bị điện tử bằng phương pháp bật tắt nguồn với một vận tốc nhanh. Điện áp vừa phải còn phụ thuộc vào vào chu kỳ luân hồi của xung hay những lượng thời hạn tín hiệu BẬT trong tương quan với lượng thời gian tín hiệu TẮT trong và một khoảng thời gian được quy định.
Vì vậy, còn tùy nằm trong vào kích thước cụ thể của hễ cơ, chúng ta cũng có thể chỉ cần liên kết đầu ra của Arduino vào chân của năng lượng điện trở hoặc Mosfet và tiến hành điều khiển vận tốc của motor bằng cách điều khiển đầu ra của PWM. Bộc lộ Arduino có công suất thấp được tắt bật chân trên Mosfet, qua đó động cơ năng suất cao sẽ được điều khiển.
Lưu ý:Bạn cần liên kết Arduino GND cùng với nguồn cung cấp năng lượng của động cơ GND.
Sơ thứ mạch điện tinh chỉnh động cơ PWM DC
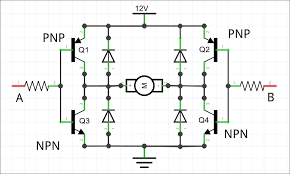
b) Điều khiển bộ động cơ DC bằng mạch cầu H
Để điều khiển và tinh chỉnh hướng con quay của motor, họ chỉ bắt buộc đảo trái lại hướng của dòng điện chạy qua cồn cơ bằng cách sử dụng mạch cầu H. Một mạch ước H cất 4 chân được chuyển mạch, điện trở hoặc Mosfet thuộc với rượu cồn cơ ở vị trí chính giữa sẽ chế tác thành một cấu hình trong y như hình chữ H. Bằng phương pháp kích hoạt 2 chiếc công tắc nguồn cùng một lúc, chúng ta đã có thể chuyển đổi hướng đi của chiếc điện, đồng thời biến hóa được phía quay của rượu cồn cơ.
Nếu bọn họ kết thích hợp được 2 cách thức PWM cùng HBridge thì sẽ có thể kiểm soát hoàn toàn tốc độ bộ động cơ DC. Có nhiều trình điều khiển vận tốc động cơ DC có những tính năng rất dị này và L298N cũng là một trong những trong số đó.
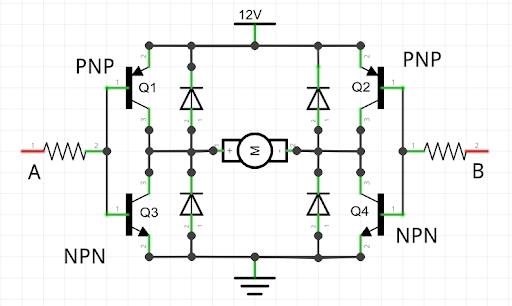
Sơ đồ điều khiển động cơ DC bằng mạch ước H
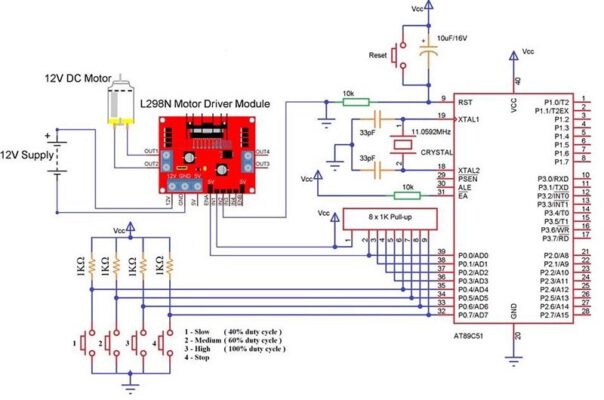
c) bộ điều khiển vận tốc motor DC cpu L298N
L298N là trình để điều khiển động cơ HBridge kép mang lại phép bọn họ điều khiển vận tốc và hướng quay của 2 động cơ DC cùng 1 lúc. Tế bào đun hoàn toàn có thể điều khiển được hộp động cơ DC mà vẫn có điện áp trong tầm từ 5 35V thuộc với dòng điện cực đại rất có thể lên mang đến 2A.
Khi đó, chúng ta cần chú ý kỹ rộng về sơ đồ dùng phần chân của mô đun L298N để giải thích được phương pháp thức, nguyên lý buổi giao lưu của nó. Tế bào đun này còn có 2 đội chân giành riêng cho động cơ A với B và một bàn chân ở giữa giành cho chân Ground với VCC cho bộ động cơ cùng cùng với chân 5V có thể được xem như là đầu vào hoặc đầu ra.
Điều này còn phụ thuộc vào điện áp đang rất được sử dụng ngay lập tức tại hộp động cơ VCC. Tế bào đun này còn có tới 5 bộ điều chỉnh 5V trên board mạch được bật/ tắt bằng cách sử dụng gai dây nối. Nếu điện áp cung cấp của hộp động cơ lên đến 12V thì chúng ta có thể kích hoạt được bộ điều chỉnh 5V với chân 5V từ bây giờ có thể được sử dụng để triển khai đầu ra để cấp cho nguồn cho board mạch Arduino.
Nhưng nếu năng lượng điện áp của đụng cơ to hơn giá trị 12V, chúng ta cần phải ngắt liên kết dây bởi điện áp cao quá sẽ có tác dụng hư hỏng bộ điều chỉnh 5V làm việc trên board. Trong trường hòa hợp này, phần chân 5V sẽ được dùng để triển khai đầu vào vì bọn họ đang cần kết nối nó vào nguồn điện 5V làm cho IC bao gồm thể chuyển động bình thường.
Chúng ta cần xem xét rằng, nhỏ IC này sẽ làm bớt điện áp xuống còn khoảng chừng 2V. Bởi vậy, nếu như khách hàng sử dụng điện áp nguồn 12V thì điện áp tại các chân của bộ động cơ sẽ còn vào lúc 10V. Điều đó bao gồm nghĩa là bọn họ sẽ không thể hỗ trợ được vận tốc tối đa cho đầu ra output của bộ động cơ DC.
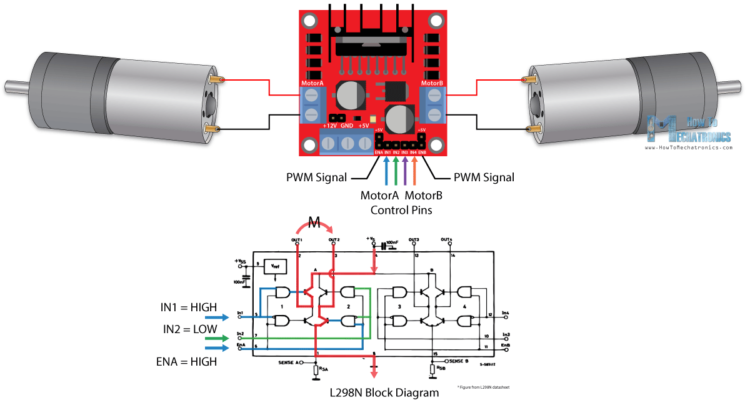
Các chân làm việc nút nhảy A và nhảy B thường được sử dụng để hoàn toàn có thể bật và điều hành và kiểm soát tốt tốc độ của đụng cơ. Nếu như 1 dây có mặt trên của cẳng chân này, rượu cồn cơ sẽ tiến hành kích hoạt cùng thực hiện hoạt động ở tốc độ tối đa. Tuy thế nếu bọn họ loại vứt dây này đi thì hoàn toàn có thể kết nối thêm 1 đầu vào PWM cùng với chân này và có thể kiểm thẩm tra được tốc độ của hễ cơ. Còn nếu muốn kết nối chân này với Ground thì cần lưu ý rằng đụng cơ cũng biến thành bị loại bỏ hóa.
Xem thêm: Mua mắt kính thời trang hàn quốc chính hãng, khuyến mãi tháng 3 2023
Nếu đầu vào 1 nằm ở tầm mức THẤP và nguồn vào 2 nằm ở mức CAO thì bộ động cơ sẽ di chuyển ngay về phía trước. Ngược lại, giả dụ như nguồn vào 1 sẽ nằm ở mức CAO và nguồn vào số 2 đang ở mức THẤP thì bộ động cơ sẽ dịch chuyển theo hướng lùi. Trong trường hợp cả hai đầu vào đều có giá trị như thể nhau, hầu hết THẤP hoặc phần nhiều CAO, cồn cơ hôm nay sẽ dừng. Điều tương tự như sẽ được vận dụng cho nguồn vào số 3 và 4 và động cơ B.
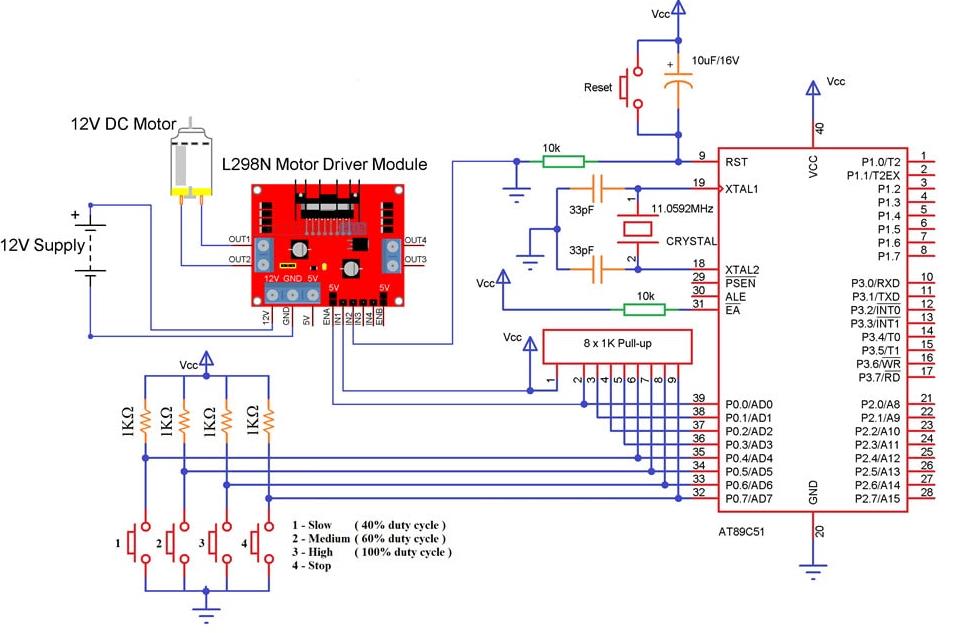
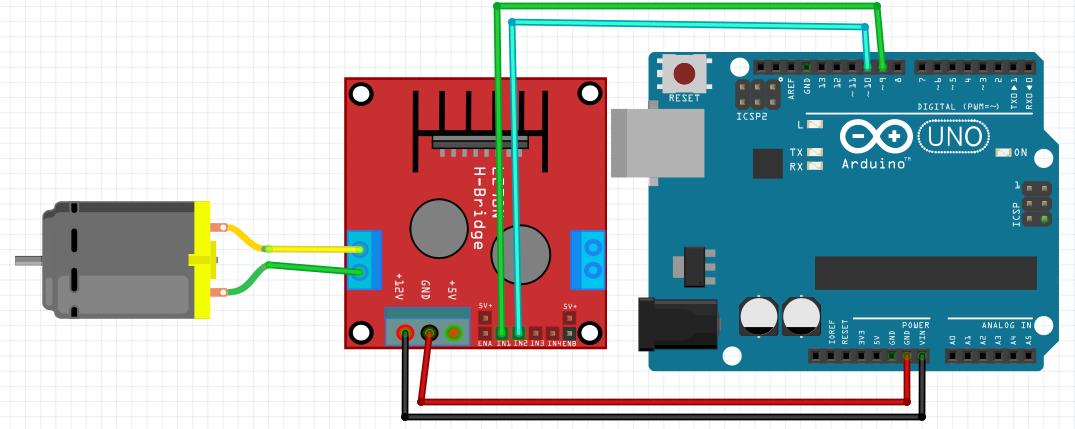
d) Mạch điều khiển tốc độ motor DC Arduino cùng L298N
Bây giờ hãy thực hiện một số ứng dụng trong thực tế. Tức thì trong lấy một ví dụ đầu tiên, bọn họ đã điều khiển tốc độ của bộ động cơ DC bởi biến trở với tiến hành đổi khác hướng quay bởi 1 nút ấn theo sơ vật dụng mạch. Vì vậy,chúng ta cần áp dụng một trình điều khiển và tinh chỉnh L298N, 1 bộ động cơ DC, trở nên trở, nút ấn và mạch board Arduino.
Các linh kiện quan trọng như:
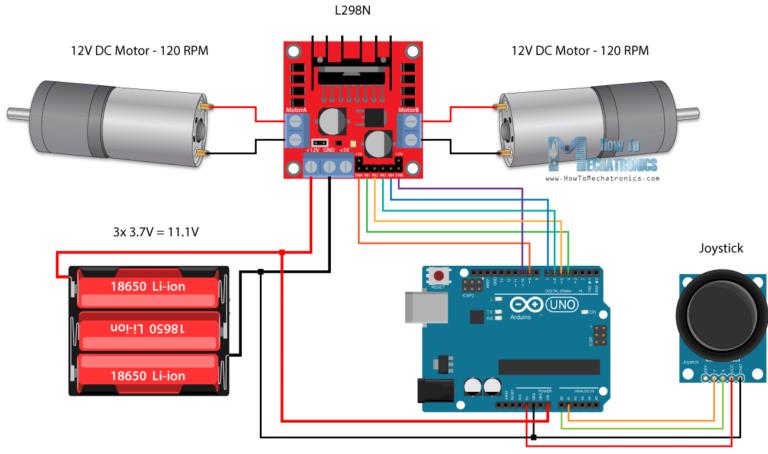
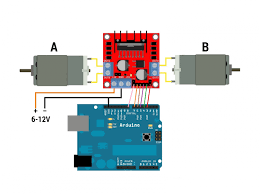
Bộ tinh chỉnh và điều khiển L298N,Động cơ DC 12V,Board Arduino,Breadboard cùng dây nối.e) Sơ Đồ Điều khiển xe Arduino bởi bộ tinh chỉnh L298N
Tất cả hầu như gì chúng ta cần chuẩn bị đó là 2 motor DC, trình điều khiển và tinh chỉnh L298N, board Arduino và sau cùng là phải điều khiển. Về nguồn điện, nên chọn lựa sử dụng 3 sạc Liion 3.7V để hoàn toàn có thể cung cung cấp điện áp tổng số là 11V. Làm cho chiếc khung xe bằng ván nghiền dày thêm 3mm, tiếp đến gắn những động cơ vào đó bằng 1 mẫu khung kim loại. Cuối cùng, đính bánh xe cộ vào trong hộp động cơ và phía trước bạn gắn 1 bánh xe cộ xoay.
Bây giờ họ hãy quan gần kề xem code Arduino sẽ vận động như núm nào nhé.
Sơ đồ tinh chỉnh và điều khiển xe Arduino bởi bộ tinh chỉnh L298N
Sau khi xác minh được những chân, vào phần vòng lặp, các bạn hãy bước đầu với việc đọc toàn bộ các cực hiếm của trục X và Y vào phím điều khiển. Buộc phải điều khiển được gia công bằng 2 biến đổi trở từ bây giờ sẽ được kết nối với nguồn vào analog của hệ điều khiển và tinh chỉnh Arduino cùng chúng sẽ sở hữu được giá trị từ bỏ 0 1023. Lúc cần điều khiển đạt mang đến vị trí trung tâm, quý giá của cả 2 loại biến hóa trở hoặc trục sẽ ở vào lúc 512.
Tăng thêm một dung sai có giá trị trường đoản cú 470 550 là chính, nếu như tiến hành di chuyển trục Y của phím điều khiển chạy lùi xuống bên dưới số 470, chúng ta sẽ đặt phía quay của 2 động cơ chạy về phía sau bằng 4 chân đầu vào. Sau đó, thực hiện biến đổi các giá bán trị cho nó bớt dần từ 470 0 thành quy trình tăng quý giá PWM lên từ bỏ 0 255, đây đó là tốc độ của hễ cơ.
Tương tự, trường hợp tiến hành dịch rời trục Y của loại cần điều khiển về phía trước và giá trị của nó vượt vượt 550, thời gian này bạn sẽ có những động cơ đang dịch chuyển về vùng phía đằng trước và tất cả sự chuyển đổi số trường đoản cú 550 1023 để trở thành giá trị PWM từ bỏ 0 255. Nếu dòng cần điều khiển nằm chính giữa thì tốc độ động cơ sẽ được tính bằng 0.
Tiếp theo, sử dụng trục X mang đến hệ tinh chỉnh ơ bên trái và sống bên buộc phải của xe. Bởi vậy, họ cần biến hóa số đọc của trục X thành giá bán trị tốc độ dao hễ từ 0 255. Để dịch rời sang phía mặt trái, bạn phải sử dụng quý hiếm này để có thể làm giảm tốc độ động cơ sống phía bên trái và tăng cường tốc độ động cơ ở bên phải. Ở đây, vày đặc trưng của những hàm số học, bạn cần sử dụng nhị câu lệnh if để triển khai giới hạn phạm vi vận tốc của động cơ nằm trong khoảng từ 0 255. Tùy trực thuộc vào lượng năng lượng điện áp áp dụng và đụng cơ chính nằm ở tốc độ thấp hơn, rượu cồn cơ sẽ không thể dịch chuyển và khi ấy nó sẽ tạo nên ra âm nhạc ù ù. Vào trường hợp này, những động cơ cũng trở nên không thể di chuyển nếu như cực hiếm của tín hiệu PWM chỉ đạt mức dưới 70.
Kết luận
Điều khiển vận tốc motor DC bởi Arduino sẽ không là sự việc gì nếu như khách hàng tuân thủ những hướng dẫn trong nội dung bài viết trên. Khi đó, hãy sử dụng hai câu lệnh if mà cửa hàng chúng tôi đã giới hạn nằm ở phạm vi vận tốc từ 70 255. Cuối cùng, bạn chỉ việc gửi vận tốc động cơ cuối cùng hoặc đơn giản là dấu hiệu PWM đến những chân vẫn được cho phép của trình tinh chỉnh và điều khiển L298N là được.
Mạch điện điều khiển tốc độ motor DC 12V đã ngày càng được nhiều người dùng ưa chuộng. Cùng với thời kỳ công nghiệp hóa hiện đại hóa thì việc áp dụng những mạch năng lượng điện vào trong quá trình sản xuất là vấn đề tất yếu. Với nhiều tác dụng trong cuộc sống, mạch điện điều khiển DC ngày dần được người dùng nghiên cứu. Hôm nay, Văn Thái sẽ cùng các bạn tìm hiểu gần như thông tin chi tiết nhất về các loại mạch điện này.
1. Điều khiển tốc độ motor DC là gì?
Đầu tiên, chúng ta cần hiểu đúng đắn việc điều khiển tốc độ motor DC là gì? Động cơ DC được hiểu là bộ động cơ 1 chiều được bố trí theo hướng dòng điện xác định. Việc điều khiển vận tốc motor DC được xem như như là một trong những việc làm thông dụng của tín đồ trong nghề. Chúng được đọc là việc là tăng hay giảm dòng điện lên motor từ đó kiểm soát hoạt động của động cơ.

Bài viết trên đấy là những chia sẻ của cửa hàng chúng tôi với ước ao muốn đem đến cho quý quý khách hàng những tin tức hữu ích nhất. Ngoại trừ ra, nếu như quý người tiêu dùng cần tìm cài đặt các sản phẩm về hợp kim và linh kiện cơ khí khác.
Quý khách có thể liên hệ với shop chúng tôi thông qua các hình thức sau:
gmail.com-Website:https://giaoandientu.edu.vn/
LLz (Linh khiếu nại Văn Thái Hà Nội)Công ty Văn Thái chúng tôi chuyên hỗ trợ các linh phụ kiện và toàn bộ các loại kim loại tổng hợp theo yêu thương cầu của công ty để phân phối dao phay gỗ, với mã hợp kim nhiều chủng loại như: YG6, YG6Z, YG8, YG3X, YG15C, YG20C, YG25C… tùy vào nhu yếu sử dụng của chúng ta mà cửa hàng chúng tôi có: dây cắt Trường Thành, dây cắt Cánh Chim ( xanh, đỏ ), dây giảm Quang Minh ( cam, xanh ), dây cắt Honglu ( giấy, vật liệu nhựa ), dây giảm Kim cương và cả dây cắt Nhôm,… dầu cắt dây DX-2, dầu giảm JIARUN #1 ( JR#1) ( dầu xanh lá ), dầu giảm JIARUN 2A, vỏ hộp dầu JIARUN 3A, dầu SDK2, dầu SDK 3 ( dầu xoàn ), dầu SDK 118, dầu WED-218 với cả dầu mài JD,…. Động cơ điện, hộp động cơ bước tiến, bánh xe pháo (puly), nút đồng, nắp đậy, bộ bạc bẽo đạn bánh xe, bạc tình đạn, động cơ điện, trang bị bơm, thẻ HL, dây Curoa, hợp kim dẫn điện,….
Lựa chọn Văn Thái cùng các sản phẩm do Văn Thái hỗ trợ quý khách sẽ vô cùng sử dụng rộng rãi vì shop chúng tôi có:
Dịch vụ giao hàng nhanhHậu mãi tốtSản phẩm ngân sách hợp lý, chủng một số loại đa dạng









